-
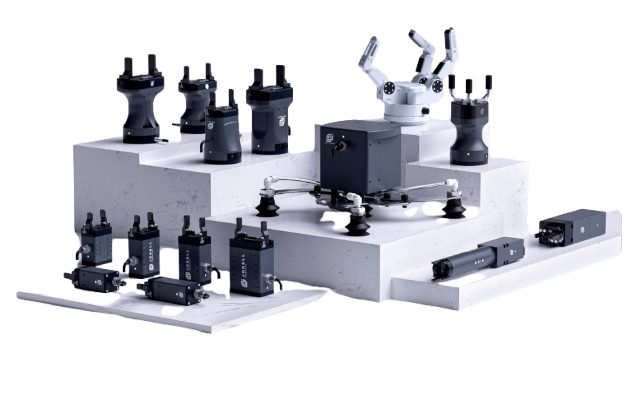
 电动平行夹爪
电动平行夹爪 -
 高精度电动平行夹爪
高精度电动平行夹爪 -
 机器人电动夹爪
机器人电动夹爪 -
 长行程电动平行夹爪
长行程电动平行夹爪 -
 称重夹爪
称重夹爪 -
 超薄型平行电爪
超薄型平行电爪 -
 电动旋转夹爪
电动旋转夹爪 -
 高精度旋转夹爪
高精度旋转夹爪 -
 电动吸盘(负载8KG)
电动吸盘(负载8KG) -
 电动吸盘(负载1KG)
电动吸盘(负载1KG) -
 ZR执行器 (直线旋转执行器)
ZR执行器 (直线旋转执行器) -
 电动直线滑台
电动直线滑台
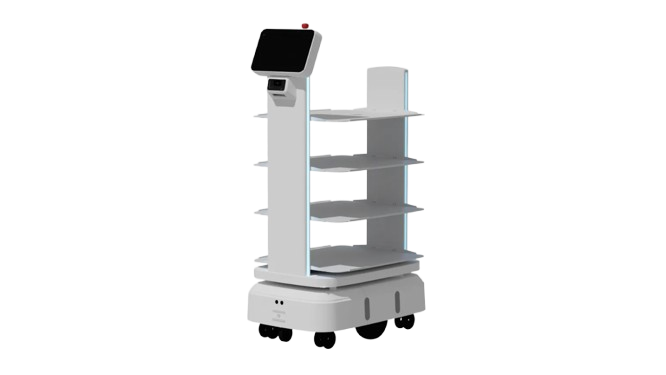
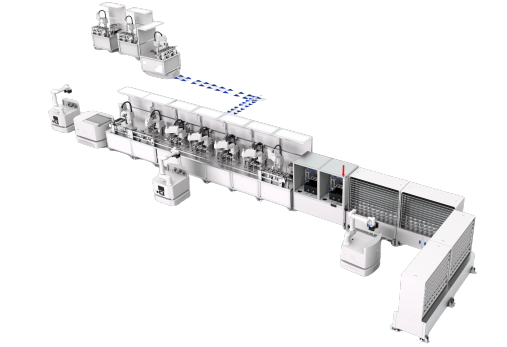
应用
丰富组件与工艺包快速集成各种解决方案
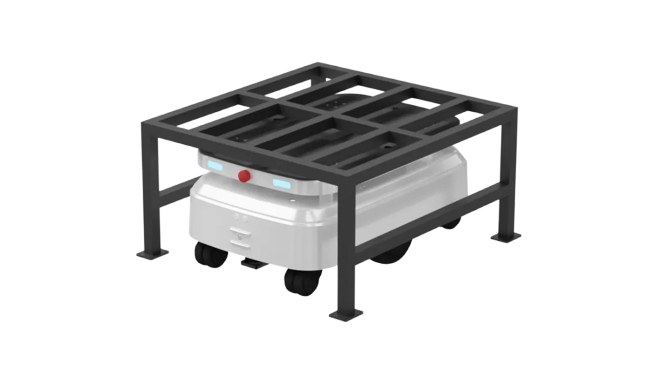
 电力行业
电力行业